课程简介
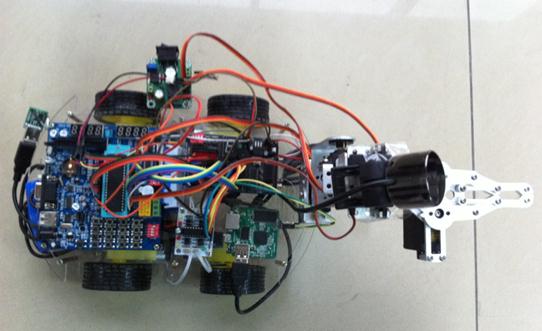
作品主要分为8个模块
(1) 主控模块:本模块是比赛所提供的宏晶公司最新STC15系列IAP15F2K61S2芯片。ISP/IAP,在系统可编程/在应用可编程,无需编程器,无需仿真器。可当仿真器使用。
(2)wifi模块:通过wifi模块,实现上位机与机器人的连接,使得救援人员可以通过上位机控制机器人的动作,并且实现视频的传输。
(3)上位机:用C#编写,显示wifi传输的视频图像,让人清晰的看到机器人周围的情况,从而控制机器人的动作。
(4)直流电机驱动模块:通过L293控制电流的方向,从而实现电机的正反转。
(5)舵机驱动模块:控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标而停止。
功能与使用说明
(1)功能:本作品可以通过wifi传视频给上位机控制小车的前进后退左转右转,机械手臂的运转以及抓放。
(2)使用说明:给直流电机接上12伏的电压,舵机接上7伏的电压,主控板和舵机驱动以及直流电机驱动和wifi模块接上5伏的电压,连接好后,通过控制上位机来实现机器人的运动,例如,点击上位机的左,机器人将向左方向行驶。
该系统相关内容介绍:http://forum.eepw.com.cn/thread/224255/1
课程目录
00:04:07